本文聚焦于金华职大团队研发的高性能仿生跳跃机器人,介绍了其研发背景、特点、研发过程中的技术运用、参赛成果以及专家评价等内容,展现了该机器人的先进性和团队的创新能力,同时提及团队后续的目标和期望。
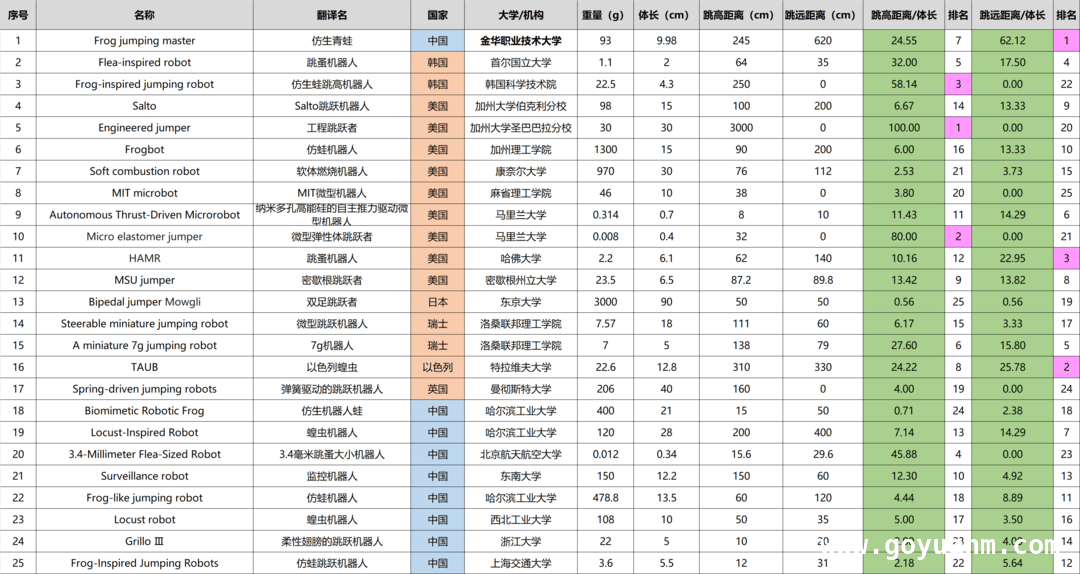
在科技的舞台上,机器人研发领域始终是竞争激烈且充满无限可能的战场。就在1个月前,哈佛大学研发的跳蚤跳跃机器人凭借23倍体长的惊人跳跃比,成功登上了Science官网头条,其相关研究成果的论文也在《Science Robotics》杂志上发表,这一消息瞬间引发了业界的广泛关注。然而,在国内,有一支来自金华职大的团队同样在跳跃机器人研发领域取得了令人瞩目的成就。他们精心打造的高性能仿生跳跃机器人,是以青蛙为原型进行设计的。这个小巧而精致的机器人,长98毫米,宽50毫米,高62毫米,每一个零部件都经过了精细的打磨,最小的零部件误差甚至要精确到0.1毫米之内,如此高的精度要求,足见团队在研发过程中的严谨与专注。当前,各国在太空探险领域的竞争日益激烈,呈现出白热化的态势。即便是在机器人技术方面全国排名第一的哈尔滨工业大学,目前所研发的跳跃机器人跳远距离也不足自身体长的20倍。而金华职大团队的负责人王振阳同学介绍,他们基于青蛙跳跃机理研发的超高性能仿生跳跃机器人,具备全自动储能跳跃、落地扶正等先进功能。目前,团队正在新材料、储能系统等关键领域申请6项发明专利,这无疑彰显了该机器人的创新性和技术含量。为了让这个仿生跳跃机器人达到最佳的性能,团队成员们付出了巨大的努力。成员朱奕然透露,他们运用了蒙特卡罗空间算法,对跳跃轨迹分布变化进行求解。通过设置11个不同的重心坐标,经过反复的计算和分析,最终得出了最佳跳跃重心。同时,他们还建立了后腿参数化运动模型,经过大量的仿真实验,得到了256个仿真结果,进而确定了具有最佳跳跃性能的后腿结构参数。每一个数据、每一次模拟,都凝聚着团队成员的智慧和汗水。去年7月,尽管高性能仿生跳跃机器人尚未完全成熟,但团队毅然决定参加第十一届全国大学生机械创新设计大赛。在这个与国内众多双一流高校同台竞技的舞台上,他们凭借着扎实的技术和创新的设计,最终打败了哈工大、国防科大、上海交大等名校战队,一举获得了第一名的佳绩。这一成绩不仅证明了团队的实力,也让更多人看到了金华职大在科研创新方面的潜力。主攻智能化装备设计与制造、超精密加工、工业特种机器人的浙江工业大学博士生导师曾晰教授对该团队的成果给予了高度评价。他表示:“该团队研发的仿生跳跃机器人以生物力学为理论基石,充分解耦蛙类跳跃运动中的肌肉骨骼协同机制,相关指标居国际同类研究前列。这一成果不仅代表大学生科技创新能力的突破性进展,更彰显了我国高等工程教育改革的显著成效。”


目前,王振阳正带领着团队成员们撰写论文,他们希望通过这篇论文向全世界介绍来自浙江金华的青年强音。王振阳还表达了团队的愿景:“我们也希望能与国内科研院所合作,将这款高性能仿生跳跃机器人再升级,让它跳上太空,为国家航空航天事业贡献力量。”
本文介绍了金华职大团队研发的高性能仿生跳跃机器人,其以青蛙为原型,具备先进功能,研发过程运用多种先进技术。团队在比赛中击败名校战队获得佳绩,得到专家高度评价。团队希望通过论文展示成果,并与科研院所合作升级机器人,为航天事业出力,彰显了大学生的创新能力和为国家做贡献的决心。

